Utmaningarna att automatisera småserietillverkning samt hög mix och låg volym driver robotutvecklingen mot krav på högre flexibilitet där helt nya robotgenerationer tagits fram. Vi börjar komma in i den tredje robotrevolutionen med flexibla robotar. Dessa är de fyra robotrevolutionerna.
Det finns en artikel på edig som är en kunskapsplattform med syfte att höja digitaliseringskompetensen i industrin om de fyra robot revolutionerna. Artikeln finns här
Trenderna ”ökad global konkurrens” och ”hög mix och låg volym” driver kraftigt ökad automation generellt och i synnerhet flexibel och framtidssäker automation. Bakgrunden är att kunderna vill ha större valfrihet av produktkonfigurationer, kortare produktlivslängder och högre konkurrens.
Ny teknik öppnar nya möjligheter till flexibel automation, ett exempel är OpiFlex flexibla mobila robotcell med enkel programmering samt säkerhetslösning utan staket, se video nedan
Det finns fyra robotrevolutioner definierade och de olika robottyperna passar för olika typer av behov, se bild nedan.
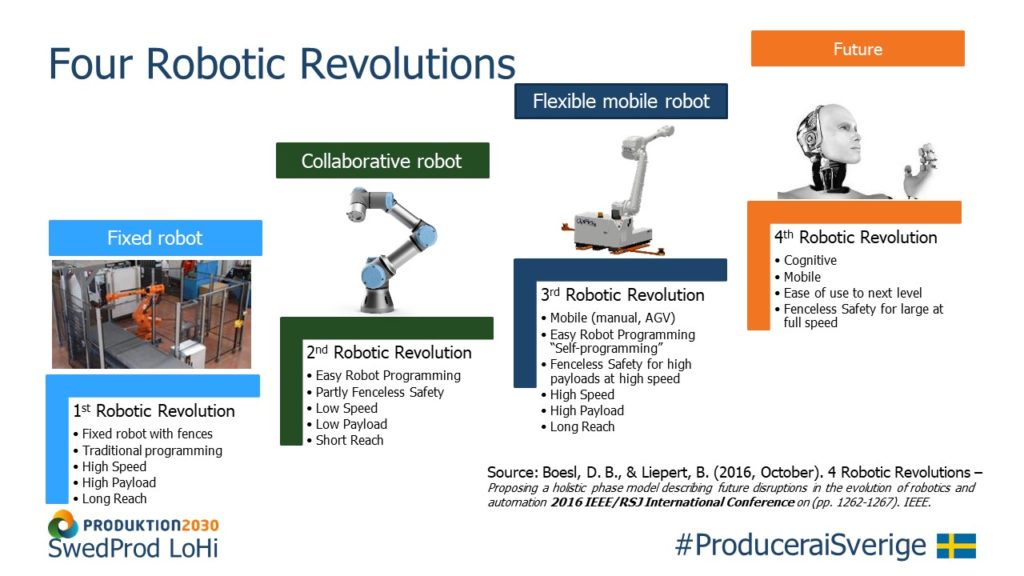
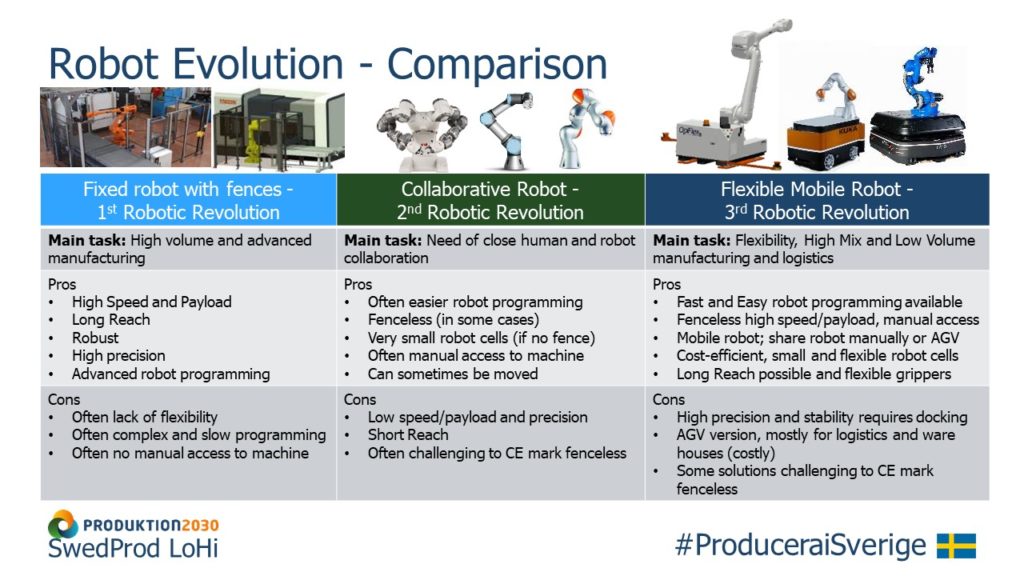
- Första robotrevolutionen ”Fasta robotar” – traditionella robotlösningar med fast robot, staket och traditionell robotprogrammering. Har använts mest för högvolymproduktion med få varianter. Dessa robotlösningar tar tid att installera och kan ibland ta stor plats pga staket. Programmering görs genom att skriva kod i aktuell robotleverantörs språk, normalt 3 000–4 000 rader kod. Det tar ofta tid att ändra program för en ny artikel, då koden måste ändras. Det finns dock vissa lösningar där vissa parametrar kan ändras för att skapa enklare programmering. Några lösningar finns så att den medger manuell access, men det kan vara svårt att få till en flexibel lösning för hög mix och låg volym. Exempel på tillverkare: Alla robottillverkare
- Andra robotrevolutionen ”Kollaborativa robotar” – ny typ av robotar som är enklare att använda, kan delvis användas utan staket och går långsamt och stannar när någon kommer åt dem. Det kan vara svårt att uppfylla ISO / TS 15066: 2016, som specificerar säkerhetskrav för kollaborativa industrirobotsystem och applikationer, utan extra säkerhetslösningar som staket, laserridåer eller laserskannrar. Det är ca 4% av applikationerna enligt studier där robot och människa aktivt behöver samarbeta. Programmeringen är ofta enklare än för traditionella robotar, men kräver fortfarande all logik och sammankoppling med maskinen eller utrustning för att fungera. Dessa är tänkta att användas framförallt där människa och robot behöver samverka. Exempel på tillverkare: Universal Robots (UR3, UR5, UR10), KUKA (LBR iiwa); ABB (Yumi), Yaskawa (HC10, SDA, SIA), Doosan m fl. Det här området har mycket stark tillväxt och är populära vid rätt applikationer, men många inser nackdelar då de är långsamma, har kortare räckvidd och hanterar relativt låg last. Det är också svårt att upprätthålla säkerhetskrav och att CE märka.
- Tredje robotrevolutionen ”Flexibla robotar” – stora flyttbara robotar utan staket som uppfyller säkerhetskraven i hög fart och hög last och enkel robotprogrammering på en ny nivå, med en ny typ av flexibilitet. De kan flyttas manuellt eller automatiskt och kan köras i full fart utan staket, vilket gör att de kan användas på en maskin eller enkelt delas med flera maskiner och ger full manuell access till maskinen. De har en enkel robotprogrammering där roboten redan känner till hur maskinen och robotcellen fungerar. Roboten skapar själv programmet genom att operatören visar i vilken ordning den vill betjäna maskinerna/stationerna, svarar på några enkla frågor och visar t ex hur man vill greppa ett objekt eller stoppa in den i maskinen. Exempel på tillverkare: OpiFlex (MRP10, MRP20, MRP60 med små/stora ABB robot med förflyttning av manuell eller AGV palltruck), MIR (AGV med cobot), Omron (AGV med cobot) (AGV med cobot), Kuka (AGV med cobot eller stor robot). Mycket stark tillväxt och efterfrågan från både mindre företag, men även stora OEM och TIer1 då de klarar både hög flexibilitet, hög prestanda och därmed en framtidssäker lösning. De klarar också alla säkerhetskrav för CE märkning utan staket.
- Fjärde robotrevolutionen ”Tänkande robotar” –Idén är att kunna skapa tänkande robotar med bl a AI samt gripdon som ser ut som fingrar, detta i kombination med stora flyttbara robotar utan staket som uppfyller säkerhetskraven i hög fart och hög last. Det är lockande men svårt då det oftast behövs mycket data för att lära och speciellt vid korta serier. Det finns exempel på gripdon från exempelvis Schunk som ser ut som fingrar, men det är prototyper som lyfter lite och är dyra. Ser detta som framtid än, men klart intressant.
Vill du läsa mer om möjligheter med flexibla robotlösningar och hur de kan användas, läs mer här
Kundexempel på användning av flexibla robotar finns här






