Vi har gjort en studie på 250 företag om vad som är det viktigaste för att skapa en flexibel och framtidssäker robotlösning. Detta har vi kommit fram till:
Snabb och enkel programmering – är mycket viktigt, speciellt vid mindre serier. Operatören ska själv kunna skapa nya program snabbt och enkelt. Det finns olika lösningar för enkel programmering. Hur kort seriestorlek som är lönsamt att använda robot för, är avhängigt hur snabbt och enkelt det är att programmera. Det finns olika lösningar som gör att operatören ska själv kunna skapa nya program snabbt och enkelt,
Flexibla gripdon – det är mycket viktigt att ha flexibla gripdon som enkelt kan ställas om och användas till många olika produkter är viktigt. Behöver du skapa ett nytt gripdon för varje ny produkt, så ökar kraftigt seriestorlek som är lönsamt att använda roboten till.
Full manuell access till maskinen – vid småserietillverkning kan oftast inte alla produkter köras beroende på seriestorlek, batchstorlek samt om det är greppbart för roboten. Vid snabb och enkel programmering och flexibla gripdon så kan beroende på produktmix ca 70-80% av artiklarnas köras, vilket gör att 20-30% behöver köras manuellt. Vid traditionell programmering så kan beroende på produktmix ca 20-50% kan köras med robot, vilket gör att hela 50-80% behöver köras manuellt. Det finns olika lösningar som gör att du får manuell access till maskinen, från att den står vid sidan, kan flyttas åt sidan eller kan flyttas till andra maskiner.
Säkerhetslösningar utan staket – Det finns ett kraftigt ökat intresse för att slippa staket för att minska robotceller, öka flexibilitet och framtidssäkra lösning så att det enkelt går att ändra på layouten i verkstaden. Fundera på vilken säkerhetslösning som passar för dig. Behöver operatören samarbeta med roboten och dela arbetsområde eller vill du att roboten ska jobba med hög fart och hög last och slippa staket?
Det finns säkerhetslösningar utan staket även vid hög fart och hög last, exempelvis finns en patenterad lösning från svenska OpiFlex som uppfyller EU:s maskindirektiv 2006/42 / EG, bilaga II 1. A (EN ISO 10218-2) samt ISO / TS 15066: 2016. För OpiFlex flexibla mobila robotcell med patenterade säkerhetslösning utan staket gjord av SICK, se video nedan.
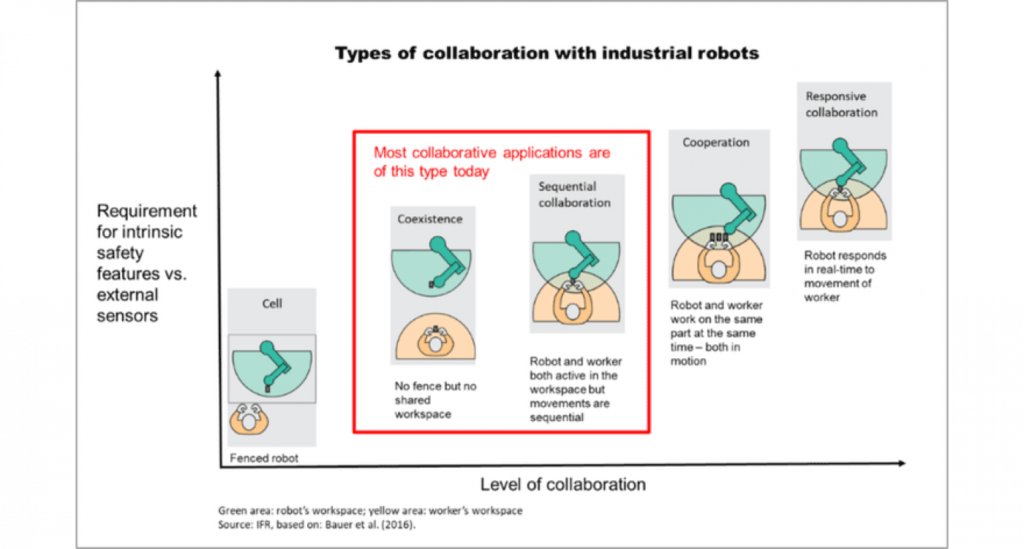
Många kollaborativa lösningar där avsikten är att människa och robot ska arbeta nära och samarbeta blir långsamma och svåra att CE märka. År 2016 kom en ny teknisk specifikation runt kollaborativa robotar och dess applikationer. ISO / TS 15066: 2016 specificerar säkerhetskrav för kollaborativa industrirobotsystem och applikationer. Där finns fem olika typer av samarbete mellan robot och människa definierade, se bild nedan. vilket gör att om det finns risk att man kan göra sig illa på något i gripdonet behöver de stå bakom staket eller ha andra säkerhetsskydd.
Flyttbar robot, dela robotcell enkelt och öka produktiviteten – med en flyttbar robot kan du enkelt dela robotceller med flera maskiner, skapa olika flexibla konfigurationer, få full manuell access samt framförallt dra nytta av den ökad produktivitet på uppåt 60-70% en robot ofta erbjuder. Detta är extra viktigt vid småserietillverkning då oftast 70-80% av volymen är möjlig att köra med robot. Om du kör manuellt 16 timmar per dag, så är roboten kanske klar på 12 timmar om hela volymen kan köras och efter ca nio timmar om 75% av volymen kan köras. Då kan du snabbt dela den med en annan maskin istället för att den står stilla som många fasta robotar gör och en mervolym kan säljas.
Välj inte för liten robot – Titta inte på hanteringskapacitet för en viss process utan tänk framåt. Vilka maskiner ska du betjäna om 5-10 år? Oftast är lång räckvidd viktigast gärna 2,5 m, då du får mer flexibilitet i cellens layout och kan nå dubbla in och utpallar. Det krävs normalt > 1,85 m räckvidd för att nå in i maskin och hel pall. Det skiljer inte mycket i pris mellan olika robotstorlekar, så oftast är valet att ta en större robot mycket bra. Roboten är normalt enbart en tredjedel av robotinstallationen.
Pall är att föredra före bana – Då materialet oftast kommer på pall är en trend att plocka direkt från pall. Tidigare med staket och vision lösningar har in- och ut-banor varit populärt, men det kostar att ha en person som lyfter upp och ner samt pallar ger oftast större buffert. Håll struktur på material för att undvika utmaningar med vision.
Sammanfattningsvis för att nå en mer flexibel automation så bör programmeringen vara snabb och enkel, gripdonen ska kunna användas till många olika produkter, det ska gå att komma åt maskinen manuellt, det ska vara säkert utan att ta för mycket plats, roboten ska gå att flytta, den ska inte vara för liten och helst komma på pall.
Läs mer om hur du automatiserar hög mix och låg volym
Vi har en guide om hur du automatiserar hög mix och låg volym och småserieproduktion. Läs “Hur du automatiserar hög mix och låg volymproduktion” här





