We have conducted a study of 250 companies on what is most important for creating a flexible and future-proof robot solution. We have come to this conclusion:
Fast and easy programming – is very important, especially for smaller series. The operator must be able to create new programs quickly and easily. There are different solutions for simple programming. How short a series size is profitable to use a robot for, depends on how fast and easy it is to program. There are various solutions that allow the operator to create new programs fastly and easily,
Flexible grippers – it is very important to have flexible grippers that can be easily adjusted and used for many different products is important. If you need to create a new gripper for each new product, the series size increases, which is profitable to use the robot for.
Full manual access to the machine – in small series production, not all products can be run depending on the series size, batch size and whether it can be gripped by the robot. With fast and easy programming and flexible grippers, depending on the product mix, about 70-80% of the items can be run, which means that 20-30% need to be run manually. In traditional programming, depending on the product mix, about 20-50% can be run with a robot, which means that as much as 50-80% needs to be run manually. There are various solutions that allow you to have manual access to the machine, from the side standing, can be moved to the side or can be moved to other machines.
Safety solutions without fences – There is a greatly increased interest in avoiding fences to reduce robot cells, increase flexibility and future-proof solution so that it is easy to change the layout in the workshop. Think about which safety solution is right for you. Does the operator need to cooperate with the robot and share a work area or do you want the robot to work at high speed and high load and avoid fences?
There are safety solutions without fences even at high speeds and high loads, for example there is a patented solution from Swedish OpiFlex that complies with the EU Machinery Directive 2006/42 / EC, Annex II 1. A (EN ISO 10218-2) and ISO / TS 15066: 2016. For OpiFlex flexible mobile robot cell with patented safety solution without fence made by SICK, see video below.
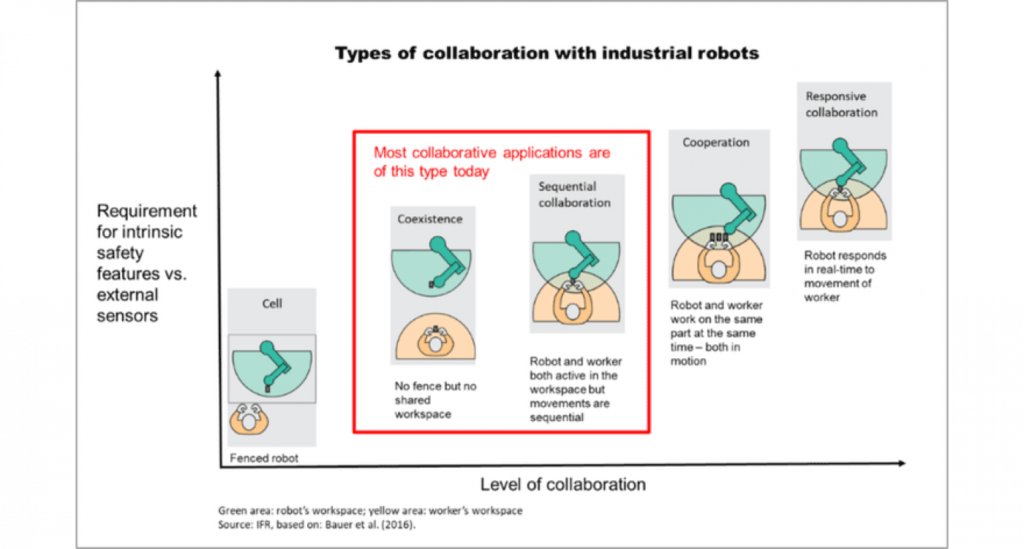
Many collaborative solutions where the intention is for humans and robots to work closely and collaborate become slow and difficult for CE to notice. In 2016, a new technical specification came around collaborative robots and their applications. ISO / TS 15066: 2016 specifies safety requirements for collaborative industrial robot systems and applications. There are five different types of cooperation between robot and human defined, see picture below. which means that if there is a risk that you can get hurt on something in the gripper, they need to stand behind the fence or have other safety protection.
Removable robot, share robot cell easily and increase productivity – with a removable robot you can easily share robot cells with several machines, create different flexible configurations, get full manual access and above all benefit from the increased productivity of upwards of 60-70% a robot often offers . This is especially important in small series production as usually 70-80% of the volume is possible to run with a robot. If you drive manually 16 hours a day, then the robot may be ready in 12 hours if the entire volume can be run and after about nine hours if 75% of the volume can be run. Then you can quickly share it with another machine instead of it standing still as many fixed robots do and an extra volume can be sold.
Do not choose a robot that is too small – Do not look at handling capacity for a certain process, but think ahead. Which machines should you operate in 5-10 years? Most often, long-range is most often 2.5 m, as you get more flexibility in the cell’s layout and can reach double in and out. It normally takes> 1.85 m range to reach the machine and the entire pallet. There is not much difference in price between different robot sizes, so usually, the choice to take a larger robot is very good. The robot is normally only a third of the robot installation.
Palletizing is preferable before track – As the material usually arrives on the stool, a trend is to pick directly from the stool. In the past with fence and vision solutions, inbound and outbound lanes have been popular, but it costs to have a person who lifts up and down and pallets usually provide a larger buffer. Keep structure on materials to avoid challenges with vision.
In summary, to achieve a more flexible automation, programming should be fast and easy, the grippers should be able to be used for many different products, it should be possible to access the machine manually, it should be safe without taking up too much space, the robot should be able to move , it should not be too small and preferably come on a stool.
Read more about how to automate high mix and low volume
We have a guide on how to automate high mix and low volume and small series production. Read “How to automate high mix and low volume production” here





